 Image credit: Unsplash
Image credit: Unsplash
Abstract
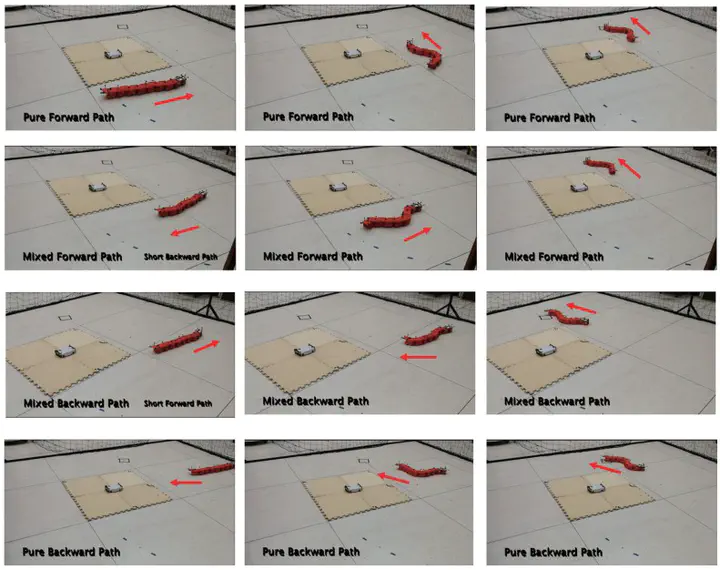
In this paper, a novel guided motion planning method is proposed for snake-like robots, which decomposes the configuration space into the fiber space and the gait space, with the motion planned in the low-dimensional fiber space, so as to avoid the dimensionality curse problem. More specifically, first, based on geometry mechanics, the kinematic connection is derived, which successfully maps the motion in the fiber space into that in the gait space. According to the kinematic connection, a novel bidirectional motion control method for snake-like robots is proposed to improve the flexibility that can produce not only the forward locomotion but also the backward locomotion additionally. The convergence of the bidirectional motion control method is proved based on averaging theory. Then, the motion planning problem is solved in the low-dimensional fiber space, for which the HJB equation is used to generate the optimal control in the fiber space to avoid the well-known curse of dimensionality. Finally, combining the bidirectional motion control and the motion planned in the fiber space, a guided motion planning method in the configuration space is proposed. Numerical simulations and experiments based on the real snake-like robot platform are performed, whose results demonstrate that the proposed algorithm is valid and robust.
Wei Zhu
Assistant Professor
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.