HumanoidDex: Multi-Objects Loco-Manipulation Framework
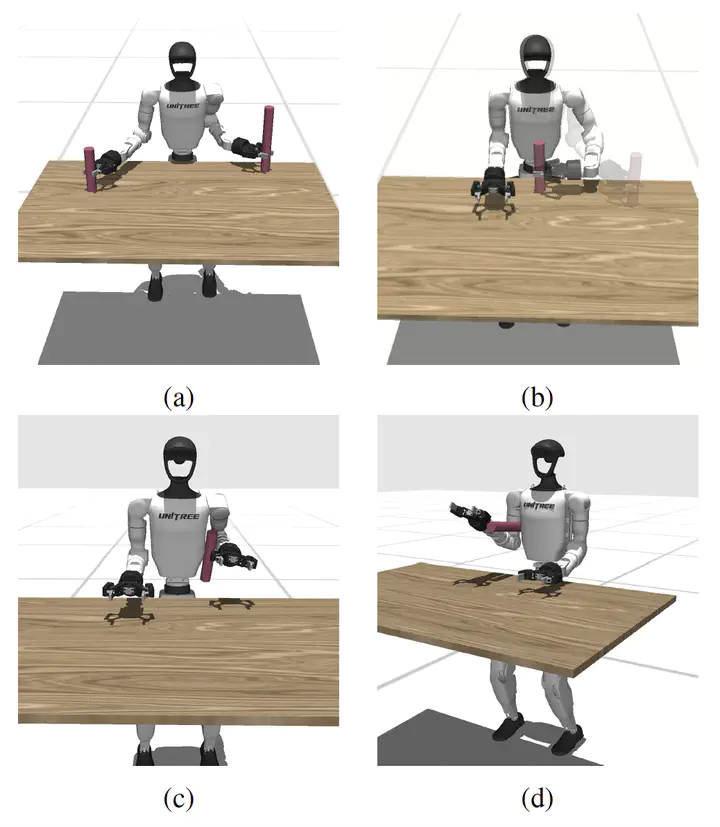 Image credit: Unsplash
Image credit: Unsplash
Abstract
Although considerable research in humanoid robotics focuses on developing general manipulation capabilities, whole-body manipulation, leveraging all body links for manipulation tasks, has received limited attention. Whole-body manipulation is particularly advantageous when robotic hands face constraints or when simultaneous carrying of multiple objects is required. To explore the potential of whole-body manipulation, we propose a framework enabling humanoid robots to carry multiple objects simultaneously using their entire body. We introduce two types of whole-body manipulation, under-arm holding and wrist-to-torso holding, significantly expanding humanoid robot manipulation capabilities. We demonstrate that compliant control effectively stabilizes object holding using body links.We integrate existing humanoid whole-body controllers, such as AMO and HOMIE, with a dynamic feedforward PD controller, providing precise upperbody movements essential for manipulation tasks alongside locomotion capabilities.
Wei Zhu
Assistant Professor
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.