A Novel Locomotion Controller Based on Coordination Between Leg and Spine for a Quadruped Salamander-Like Robot
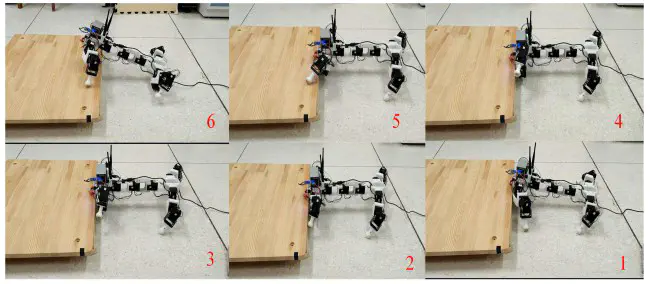 Image credit: Unsplash
Image credit: Unsplash
Abstract
In this paper, a quadruped salamander-like robot with the capability of traversing complex terrain is developed, which presents not only leg joints used in traditional legged robots, but also spine joints, so as to increases its flexibility. To coordinate spine and leg joints to balance the robot’s center of gravity, a novel control method is proposed, which consists of an inverse kinematics-based control, a bio-inspired mechanism, and a coordination law. Specifically, the inverse kinematics is utilized to calculate the control for the legs, and biological inspiration is employed for the control of the spine, while the coordination between the legs and the spine is ensured by the utilization of the static stability principle. Some typical experiments, including walking straight, turning, and avoiding obstacles, are performed for the developed quadruped salamander-like robot, with the collected results convincingly demonstrating the effectiveness of the proposed control method and the developed robot.
Wei Zhu
Assistant Professor
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.