Iterative Adversarial Learning with Chaser Agents for Time-efficient Crowd-aware Navigation
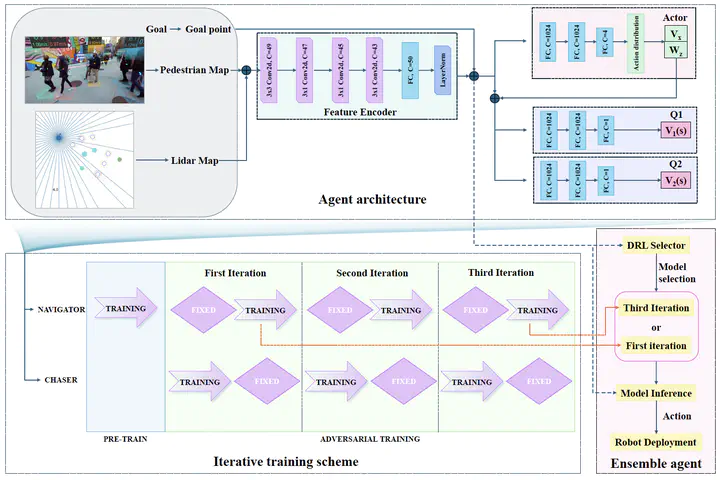 Image credit: Unsplash
Image credit: Unsplash
Abstract
This paper addresses the challenge of safe and efficient crowd navigation for autonomous robots in dynamic environments. Existing methods struggle in scenarios with unpredictable or obstructive pedestrian behaviors. These limitations raise serious safety and efficiency concerns in real-world deployments. To improve navigation robustness and efficiency, we propose an adversarial deep reinforcement learning (DRL) framework that simulates competitive pedestrian behaviors through a chaser agent. In addition, we further introduce an ensemble agent that dynamically selects policies based on real-time observations, enhancing generalization across diverse scenarios. Extensive simulation results demonstrate enhanced navigation performance in terms of success rate and navigation efficiency when using our framework. Additionally, the ensemble agent further improves stability and overall generalizability across various environments. Real-world experiments validate the approach and demonstrate the potential for sim-to-real transfer.
Wei Zhu
Assistant Professor
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.