Target-Directed Locomotion of a Snake-Like Robot Based on Path Integral Reinforcement Learning
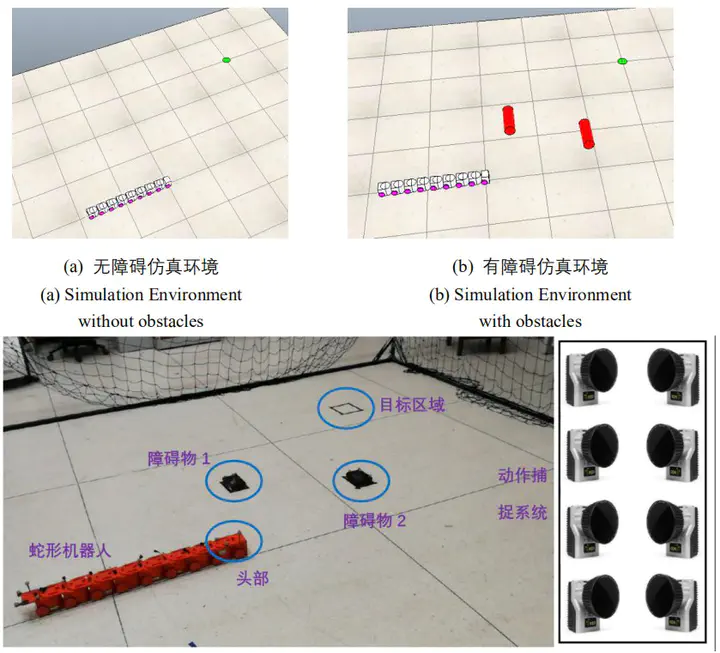 Image credit: Unsplash
Image credit: Unsplash
Abstract
Path integral is derived from stochastic optimal control. It is a numerical iteration method and solves the problem of the optimal control about continuous nonlinear systems at a high convergence speed without system model. A policy improvement algorithm based on path integral reinforcement learning is proposed for the target-directed locomotion of a snake-like robot in this paper. The path integral reinforcement learning approach is employed to learn the parameters of the snake-like robot serpentine equation, and the robot is controlled to arrive at the target position fast without contacting obstacles in simulation environment. Moreover, the robot with the priori knowledge from the simulation in real environment can complete the task well. Experimental result verifies the validity of the propose algorithm.
Wei Zhu
Assistant Professor
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.