TRANCE Terrain-aware Reinforcement Learning for Agile Navigation of Quadruped Robots in Crowded Environments
submit for IEEE ***.
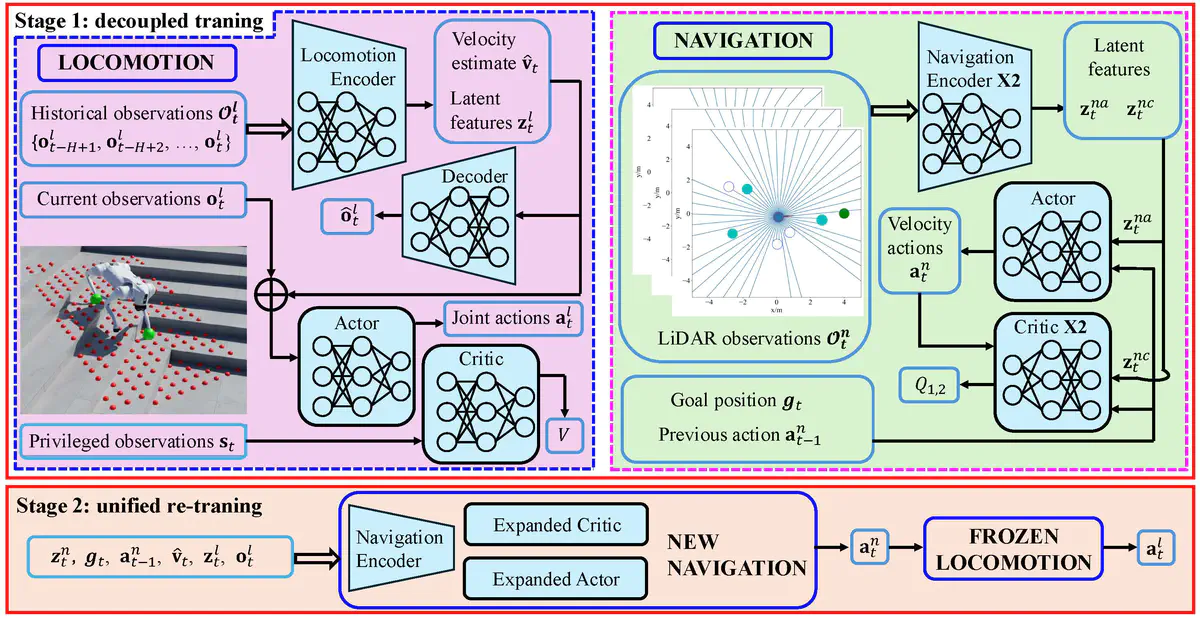 Image credit: Unsplash
Image credit: Unsplash
This study introduces TRANCE: Terrain-aware Reinforcement learning for Agile Navigation in Crowded Environments, a deep reinforcement learning (DRL) framework for quadrupedal navigation. Conventional quadrupedal navigation typically separates motion planning from locomotion control, neglecting whole-body constraints and terrain awareness. End-to-end methods are more integrated but require high-frequency sensing, which is noisy and computationally costly. In addition, most existing approaches assume static environments, limiting their use in human-populated settings. To address these limitations, we propose a two-stage training framework with three DRL pipelines. (1) TRANCE-Loco employs an asymmetric actor–critic (AC) model for quadrupedal locomotion, enabling traversal of uneven terrains without explicit terrain or contact observations. (2) TRANCE-Nav applies a symmetric AC framework for crowd navigation, directly mapping transformed LiDAR data to ego-agent actions under differential-drive kinematics. (3) A unified pipeline, TRANCE, integrates TRANCE-Loco and TRANCE-Nav, supporting terrain-aware quadrupedal navigation in uneven and crowded environments. Comprehensive benchmarks against locomotion and crowd-navigation baselines demonstrate the effectiveness of TRANCE. Hardware experiments further confirm its potential for sim-to-real transfer.
Wei Zhu
Assistant Professor
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.