Iterative Adversarial Learning with Chaser Agents for Time-efficient Crowd-aware Navigation
submit for IEEE ***.
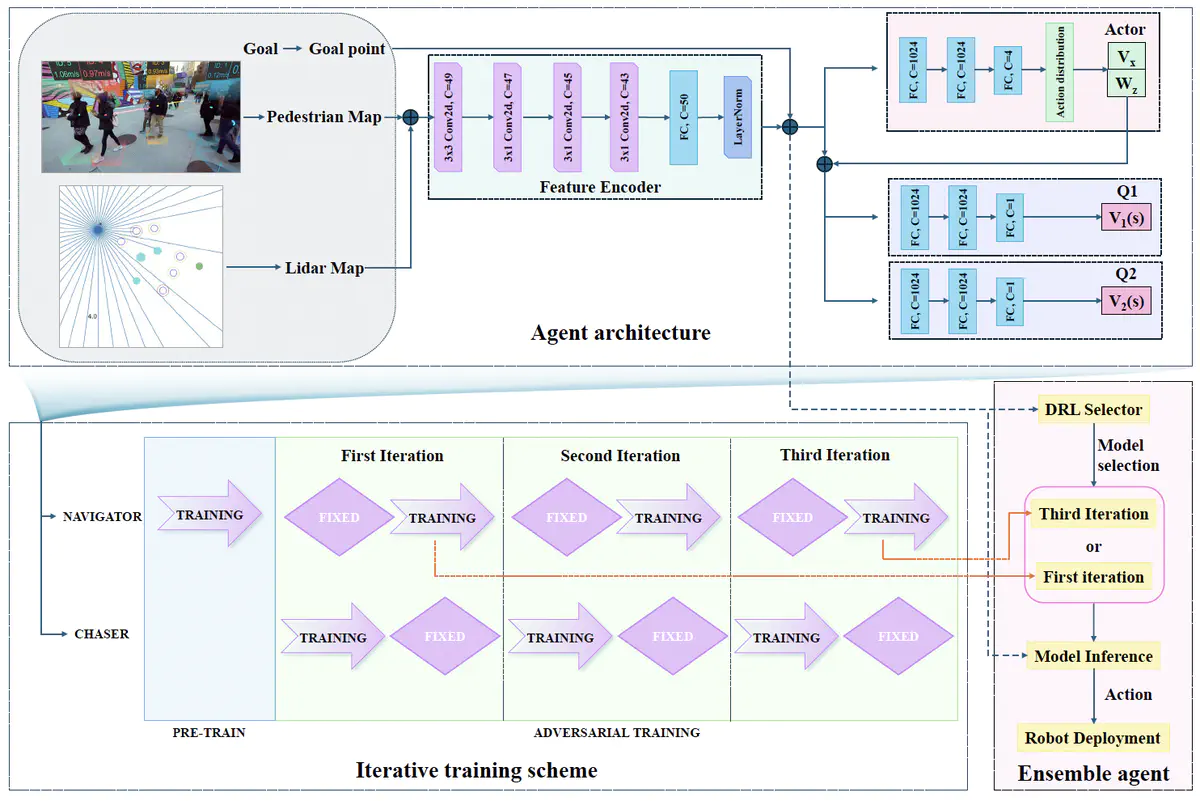 Image credit: Unsplash
Image credit: Unsplash
This paper addresses the critical challenge of safe and time-efficient crowd navigation for autonomous robots operating in highly dynamic environments.
Wei Zhu
Assistant Professor
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.